End-User Development for Adaptive Social Robot
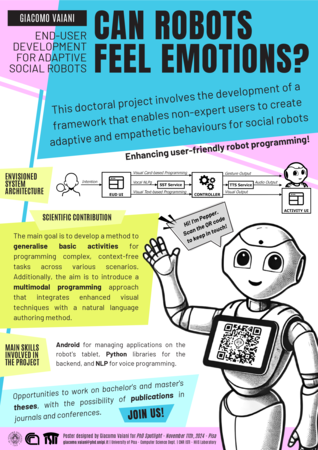
This doctoral research explores the development of an End-User Development framework for adaptive social robots, focusing on enabling non-expert users to create and customise robotic behaviours for social and assistive contexts. The study addresses critical challenges in Human-Robot Interaction, such as the difficulties non-expert users face in programming robots, issues related to the acceptance of robots, and the lack of systems that are flexible across different contexts of use. The envisioned system will include multimodal interfaces, combining visual programming with natural language inputs, allowing users to program the humanoid robot, Pepper, without requiring technical expertise. The envisioned framework emphasises adaptability and empathetic interaction, enabling the robot to modify its behaviour based on user characteristics and the surrounding social environment. A modular approach has been conceived to allow users to combine pre-designed behaviour primitives to create complex, personalised activities. The system will also incorporate large language models to support natural language programming, providing an approach still underexplored in end-user robotic programming.